
Sko af hajskind får robotter til at stå fast
Gående robotter har problemer med at stå fast. Når de går på ujævne overflader, glider de. Men nu har forskere fra SDU løst problemet. Robotterne står fast med hajskind under fødderne.
Af Birgitte Dalgaard, bird@tek.sdu.dk, 29-03-2017
Den seksbenede kakerlak-inspirerede robot forsøger at kravle op ad en stejl sliske. Den svinger sine ben frem, men benene glider tilbage uden at få afsæt. Efter flere forsøg giver robotten op.
- Det er meget svært for robotter at stå ordentligt fast på ujævne overflader. På glatte overflader udstyrer man robotfødderne med mikroskopiske sugekopper, som er inspireret af gekkoen. Men robotterne får problemer, når de skal gå på overflader som gulvtæpper eller vinyl, siger lektor Poramate Manoonpong fra SDU Embodied Systems for Robotics and Learning.
Robotforskerne har ledt videre i dyreriget for at finde et materiale, som kan hjælpe robotterne med at stå fast. Og de er endt ved sildehajerne. Hajskind blev tidligere brugt af fiskere for at stå bedre fast på et glat dæk og som beklædning på et sværds skæfte for at sikre et fast greb om sværdet.
- Vi undersøgte forskellige typer af materiale, men det mest effektive er hajskind. Under mikroskop kan man se, at hajskind er dækket af skrå rækker af små kroge eller tænder kaldet dermale denticles. Fordelen ved skindet er, at det er glat, når man stryger hånden med tænderne, men føles som sandpapir, når man stryger mod, forklarer Poramate Manoonpong.
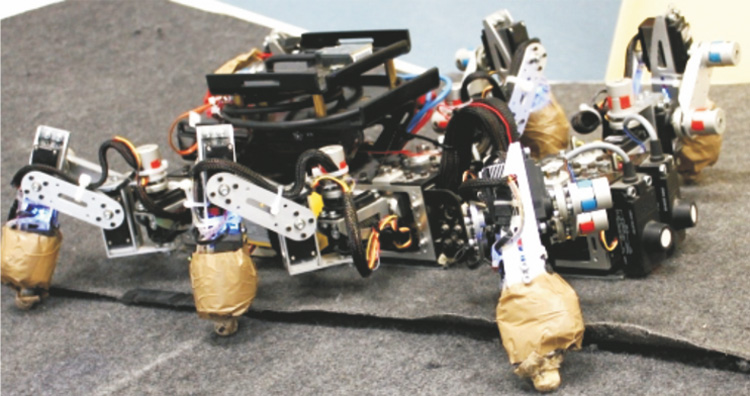
Seks robotsko af hajskind
Glatheden gør, at robotten kan løfte og svinge sine fødder frem uden modstand, mens hajskindets små tænder får robotten til at stå fast og få afsæt.
Biologer fra Kiel Universitet blødte det stive hajskind op i vand og formede seks små sko. Robotforskerne gav kakerlak-robotten skoene på, og med de nye sko kunne robotten uden problemer kravle op ad den stejle sliske.
- I vores forsøg kan vi derudover konstatere, at hajskind gør robotten væsentligt mere energieffektiv. Alt efter hvilket underlag robotten kravler op ad, bruger den op til 50 procent mindre energi, når den har hajskind på fødderne, forklarer Poramate Manoonpong og understreger:
- Det er en meget billig og effektiv løsning på et stort problem for gående robotter.
Hajskind går nemt i stykker
Men hajskindet har den skavank, at det går i stykker efter få gange op ad slisken. Derfor forsøger forskerne at fremstille et robust kunstigt materiale, som har hajskindets unikke kombination af at være glat den ene vej, men ru den anden.
- I samarbejde med forskergrupper fra Kiel Universitet og Nanjing Universitet i Kina har vi allerede fremstillet de første prototyper af et kunstigt materiale. Men modstanden fra hajskindets unikke små kroge er ikke genskabt effektivt i det nye materiale, så det arbejder vi videre på, siger Poramate Manoonpong.
Han understreger, at når forskerne først får udviklet et robust kunstigt materiale, som har hajskindets gode egenskaber, er det ikke kun robotter, som får fordel af de nye sko.
- Man kan forestille sig, at materialet med fordel kan bruges til sko til mennesker med dropfod og til de mange ældre, som har problemer med at løfte foden, men tøffer afsted. Når personen går frem, hjælper materialets glathed bevægelsen. De små kroge gør omvendt, at personen står fast og kan skubbe foden frem, forklarer Poramate Manoonpong.
Avanceret robotteknologi
Er du interesseret i kunstig intelligens, er vores kandidatuddannelse i robotteknologi måske noget for dig.