
The capability to physically interact with complex environments is a hallmark of animals and humans, such as insect navigation and human manipulation (of flexible tools, e.g., whips). It aims at understanding the roles of neural and muscle control in complex biological movement.
Understanding the movement of biological systems
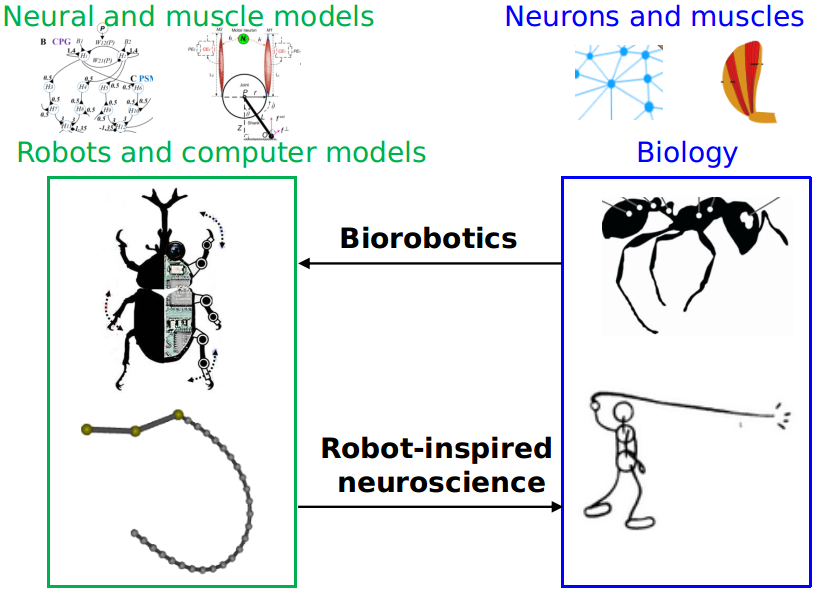
How animals move is a longstanding research question, which can date back to the greek polymath Aristotle. Following this line, this project aims at solving a puzzle: how biological systems (e.g., humans and insects) coordinate complex neural and muscle systems to perform movements (e.g., whipping and walking). Decoding these movements facilitates not only the understanding of neuromechanic control in biological systems, but also the leap developments of robots.
Project objectives
The project aims to:
- Understand the role of neural and muscle control in complex movement control
- Deepen the understanding by using computational and robotic methods
- Promote advanced control in robots (e.g., exoskeletons)
Project method
Decoding movements like insect walking and human whipping (to hit a target) is very challenging, due to neural, muscle, and tool complexities. Living insect and human movements will be recorded and analyzed by using geometric methods, proposing movement laws. The laws are justified by developing computational models consisting of neural networks and muscle models on robots, concluding the neural and muscle contributions in biological movement control.
Expected outcome and future perspectives
- An integrative way for understanding biological movements
- Advanced robot control applications (e.g., wearable robots)
- Robot-biology hybrid system modeling and control
Partners
Emily Baird, Associate Professor, Stockholm University (Sweden)
Stanislav N. Gorb, Professor, Kiel University (Germany)
Dagmar Sternad, Distinguished University Professor, Northeastern University (USA)
Funded by
Erasmus+ Mobility, EU, THOMAS B. THRIGES (DK), and Brødrene Hartmanns (DK)
Project period
January 2018 - December 2024
In the media
Human Frontier Science Program (HFSP) featured story: "No need for landmarks: dung beetle-inspired robot navigation"