Human Robotics for athletic intelligence and physical rehabilitation
A research area at SDU Biorobotics
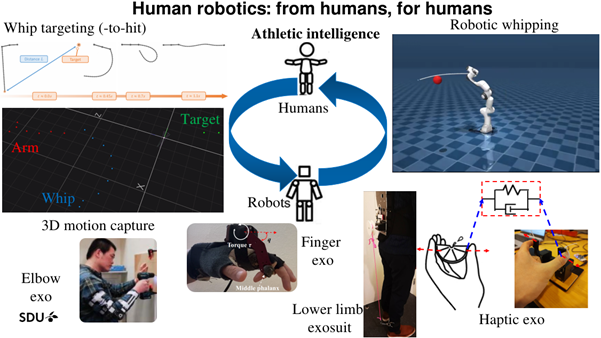
Humans have remarkable sensorimotor learning capabilities. Our research integrates computational means and robotic platforms to investigate the principles underlying humans’ ability to quickly learn complex motor tasks (e.g., whip targeting) [1]. More specifically, we focus on the following questions:
(i) How can human arms learn to carry out complex tasks?
(ii) How does learning explore and enable adaptation to individual biomechanics properties (e.g., mechanical impedance)? To answer these questions, experimental tools, such as 3D motion capture, muscle sensors, and visualization software, are utilized to collect and analyze data from humans when performing motor tasks (e.g., whip targeting) [2].
By extracting the analytic principles, the computational models (e.g., sensorimotor learning and neuromechanics control) are developed and tested both in simulated and physical bio-robotic platforms. The robot platforms and the controllers in turn serve as inspiring means to stimulate new experiments with human motor control tasks (e.g., arm swings) [3]. The resulting models and findings will be used for hardware designs and software control of exoskeletons [4, 5].
Taken together, human robotics paves a forward way to close the human-robot research loop [6]. The results can contribute to the next generation exoskeleton augmentation technology, e.g., lightweight designs, user-friendly control, and seamless collaboration.
References
[1] Xiong, X., Wang, J., Tolu, S., & Gorb, S. N. (2024). A Learning-based Control Framework for Fast and Accurate Manipulation of a Flexible Object. Journal of Bionic Engineering, Accept
[2] Xiong, X. , Nah, MC, Krotov, A., & Sternad, D. (2021). Online Impedance Adaptation Facilitates Manipulating a Whip . In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9297-9302). IEEE. https://doi.org/10.1109/IROS51168.2021.9636663
[3] Xiong, X. , & Manoonpong, P. (2021). Online sensorimotor learning and adaptation for inverse dynamics control . Neural Networks , 143 , 525-536. https://doi.org/10.1016/j.neunet.2021.06.029
[4] Xiong, X. , Do, CD , & Manoonpong, P. (2022). Learning-based Multifunctional Elbow Exoskeleton Control . IEEE Transactions on Industrial Electronics , 69 (9), 9216-9224. https://doi.org/10.1109/TIE.2021.3116572
[5] Xiong, X. , & Manoonpong, P. (2021). A Variable Soft Finger Exoskeleton for Quantifying Fatigue-induced Mechanical Impedance . In 2021 International Conference on Robotics and Automation (ICRA 2021), IEEE (pp. 10347-10352). IEEE. https://doi.org/10.1109/ICRA48506.2021.9562118
[6] Xiong, X. , & Fang, C. (2023). An Online Impedance Adaptation Controller for Decoding Skill Intelligence . Biomimetic Intelligence and Robotics , 3 (2), Article 100100. https://doi.org/10.1016/j.birob.2023.100100
Explore other research areas
Last Updated 06.11.2024